
The Helping Hand Project
Grade 12
Presentation
Problem
Our loved ones’ independence and ability to perform daily tasks can be greatly affected by dexterity disabilities. Two of the major challenges they face are decreased independence as well as less opportunities for jobs, which are both factors to their quality of life. Current solutions to this issue include those like the SmartARM, which use stereo cameras to detect objects, and the industry standard of electrode sensor control. Stereo cameras, though effective in depth perception and object recognition, falter in low light or complex environments, leading to control inaccuracies. Another challenge in prosthetic design is the dependency on electrode sensors, which require undamaged nerves to read muscle movements for control. This restricts usage for individuals with nerve damage.
Question: How can I increase independence and improve the quality of life for individuals with limited dexterity?
Hypothesis: A solution to increase independence and quality of life for individuals with dexterity disabilities can be achieved without the limitations of current solutions.
Method
Throughout the Helping Hand Project, the engineering method was consistently utilized to ensure the solution was viable. The first step to the engineering method is to identify constraints and criteria:
Constraints:
Usability: The solution should be usable by those who cannot use controls. For example, joysticks and buttons are difficult to use for people who have limited use of their hands.
Criteria:
Cost: The efficiency of the solution will be measured partly by the cost of the solution, as the solution should aim to be accessible to the highest number of people possible.
Reliability: The solution should work consistently under reasonable conditions. The solution’s uptime will determine its performance.
Adaptability: The solution’s ability to adapt to different situations will be a measure of the solution’s performance.
Accuracy: The solution’s ability to accurately interact with objects will be a measure of its performance.
Next, physical prototypes were created implementing LIDAR sensing technology:
LIDAR (Light Detection and Ranging) sensors, such as the VL53L0X, have revolutionized distance measurement in various fields due to their precision and reliability. These sensors emit pulsed light waves, typically infrared, and calculate the distance to an object by measuring the time taken for these pulses to reflect back. The distance is calculated using the formula , where
is the distance,
is the speed of light, and
is the round-trip time of the light pulse. A key advantage of LIDAR sensors like the VL53L0X is their resilience to ambient light interference, making them highly accurate in diverse lighting conditions. This robustness is due to the sensor's use of specific light frequencies and its ability to distinguish its own emitted light from background light.
The development process involved designing iterations in Solidworks and then bringing these designs to life through 3D printing. To evaluate the reliability, adaptability, and accuracy of each design, a consistent set of diverse objects was used across all tests. These components underwent rigorous testing, including exposure to compressive, bending, and torsion forces of 10N generated by six servos, repeated over 300 cycles to ensure durability and functionality. A significant innovation within this project is the Gecko Nano Mimicking Technology, which utilizes a composite of fiberglass and silicone. The molds for this technology were also designed in Solidworks, 3D printed, and then enhanced with laser-cut PET to replicate the intricate structures found in gecko feet, aiming for superior adhesion capabilities.
Figure 1: Testing prototype strength
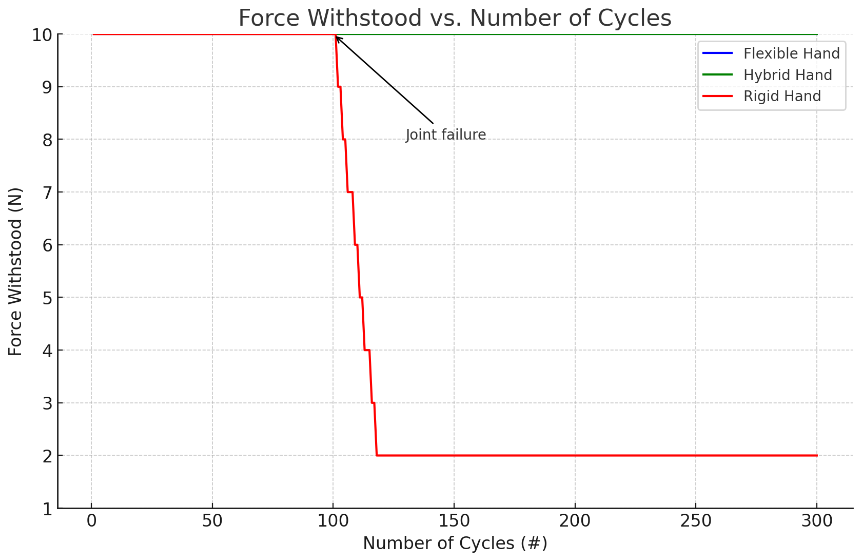
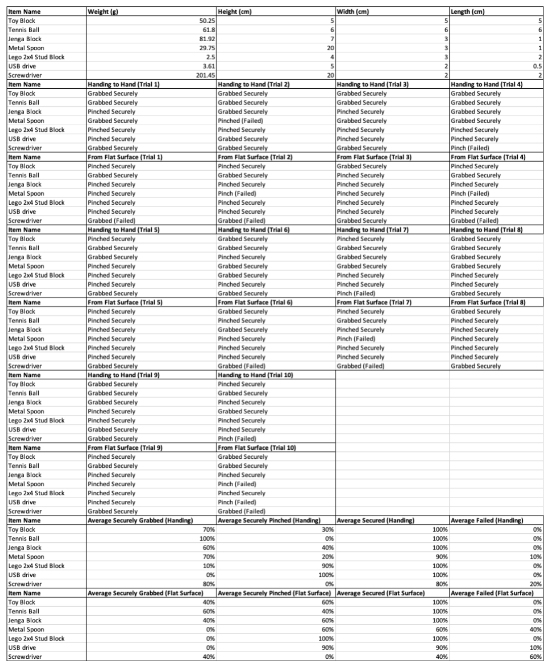
Table 1: Data for Range of Household Objects on Different Surfaces and Configurations
Analysis
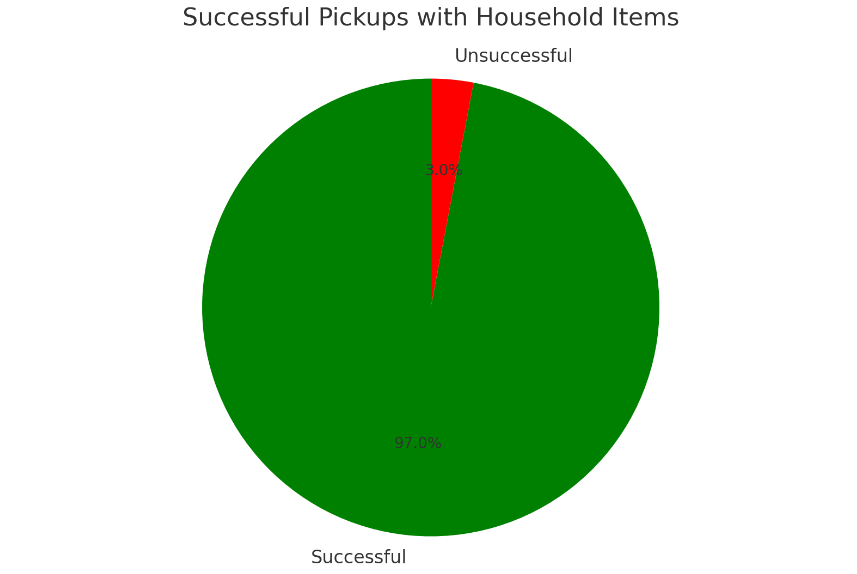
In the rigorous testing phase of the project, each iteration of the design underwent comprehensive evaluation to ensure its effectiveness and reliability. The testing involved using objects that varied widely in weight, size, surface texture, and orientation, presenting a broad spectrum of challenges to assess the adaptability and precision of the prototype hand. To meticulously gauge performance and identify areas for improvement, the testing protocol included recording the intended actions of the hand—what it was supposed to do in each test scenario—and comparing these with the actual outcomes. This methodical approach allowed for a detailed analysis of any discrepancies between expected and achieved performance, highlighting specific areas where adjustments were necessary. Through this iterative process of testing and refinement, the final iteration of the design demonstrated remarkable efficacy, achieving a 97% success rate in handling the diverse set of items. This high level of accuracy is indicative of the meticulous attention to detail and the effectiveness of the testing and improvement cycle that was employed.
Figure 2: Percent Success Rate vs Fail rate for Household Items
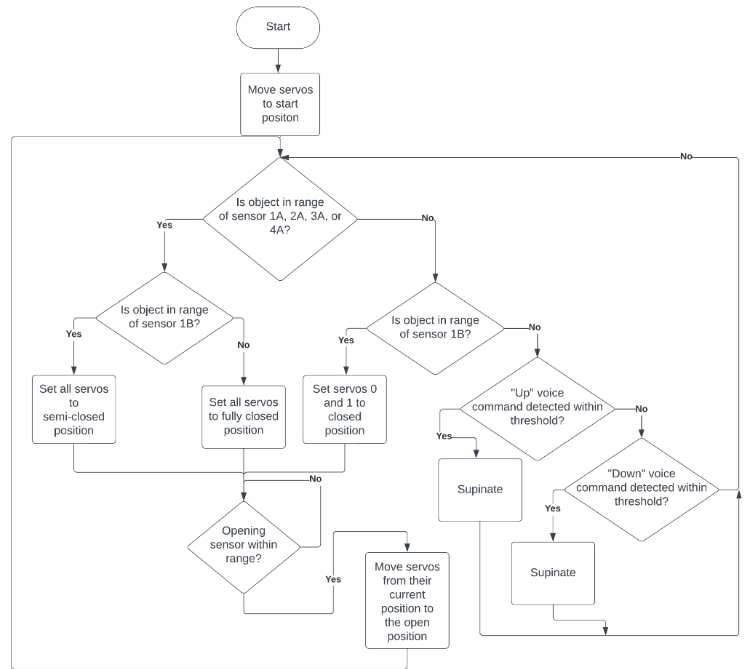
The most recent iteration consists of 8 LIDAR sensors on the palm of the hand, one LIDAR sensor on the index knuckle, and one LIDAR sensor on the base of the palm. A microphone is used to detect audio data, where it is put through a machine learning algorithm to compare it against a set of sample recordings of the voice vommands "Up" or "Down" to control supination and pronation of the forearm joint. Finally, a LIDAR sensor at the base of the forearm controls recording and whether or not the hand opens when closed.
Figure 3: Overall Design of Newest Iteration
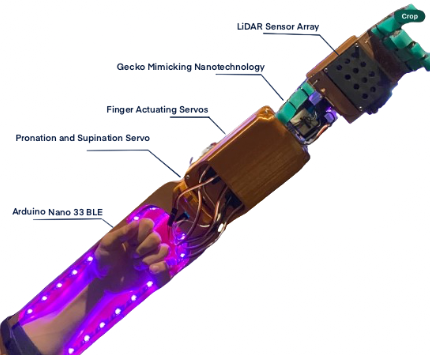
Figure 4: Flowchart of Logic During Use
Conclusion
The Helping Hand utilizes LIDAR technology to operate effectively in various lighting conditions and is engineered to assist individuals without the need for nerve inputs. It successfully demonstrated a capability to mimic below-the-elbow dexterity, with a 97% success rate in grasping everyday objects. The device was developed with specific success criteria in mind, focusing on adaptability, accessibility, accuracy, and reliability. It is designed to handle a wide range of objects, be usable by individuals lacking motion in their hands or wrists, and provide a reliable solution for daily use.
Despite its successes, the Helping Hand encountered challenges such as achieving an optimal balance between weight and functionality, acquiring the necessary technical skills for development, and managing the complexity of wiring and sensor integration due to the extensive use and the intricate nature of the solution. These challenges underscore the technical and practical considerations involved in developing assistive technology.
The Helping Hand device not only serves individuals with dexterity impairments by enhancing their ability to perform daily tasks but also holds potential for broader applications across different fields. Its design allows for increased independence for those lacking hand mobility, potentially opening up new employment opportunities and contributing to greater financial autonomy. Moreover, the technology behind the Helping Hand can be adapted for teleoperated and autonomous systems, broadening its utility. For instance, in healthcare, the Helping Hand could be integrated into nursing robots to provide care for patients, offering a new level of assistance and interaction. In aerospace, attaching the device to space suits could aid astronauts in performing repairs and tasks in outer space, where manual dexterity is challenged by the bulky gloves of space suits. Additionally, in the medical field, the Helping Hand could be utilized to enhance the precision and accuracy of surgical procedures, potentially improving outcomes and patient survival rates.
Improvements that could be made in the future include weight reduction by utilizing materials like carbon fiber or minimizing the number of servos used, which can substantially lower the overall mass and enhance efficiency. Enhancing grip precision and the ability to manipulate smaller objects could be achieved by impregnating flex PLA with silicone and incorporating a gecko-like imprint on the fingertips, allowing for a smaller contact surface yet stronger grip due to the increased friction and tactile feedback. Moreover, aiming for an overall more streamlined design will not only improve the aesthetic appeal but also contribute to better functionality and wearability. This can be complemented by adopting advanced manufacturing techniques, which can further refine the product's finish, durability, and comfort for the user. These advancements will collectively lead to a more sophisticated, efficient, and user-friendly design, setting new standards for future developments in this field.
Because of the nature of the LIDAR sensor's and the solution's autonomous capabilities, the hypothesis has been proven. A solution to help individual's with limited dexterity can be created which is not limited by the amount of light in an environment or the presence of nerves, which are both limitations of current designs.
Citations
- Söderby, K. (n.d.). Nano 33 BLE sense community projects. Arduino Documentation. Retrieved from https://docs.arduino.cc
- The Engineering Projects. (2021, January 17). Introduction to Arduino Nano 33 BLE. Retrieved from https://www.theengineeringprojects.com
- Adafruit Industries. (2019, November 20). RC mini car using the Arduino Nano 33 BLE #Bluetooth #Robots @bitbank. Retrieved from https://blog.adafruit.com
- ElProCus. (n.d.). VL53L0X: Pin configuration, circuit diagram specifications & applications. Retrieved from https://www.elprocus.com
- Seeed Studio. (n.d.). VL53L0X time-of-flight distance sensor: Arduino guide to get started. Retrieved from https://www.seeedstudio.com
- Alex, A. (2015, September 2). How to make a beginner's robot using Arduino. Maker Pro. Retrieved from https://maker.pro
- Learn Robotics. (n.d.). The simple guide to writing an Arduino program. Retrieved from https://learnrobotics.org
- Arduino. (n.d.). Getting started with the Arduino robot. Arduino Documentation. Retrieved from https://arduino.cc
- Motion Control Tips. (n.d.). How to choose a servo motor. Retrieved from https://motioncontroltips.com
- Earl, B. (2023, December 9). Using the Adafruit library. Adafruit Learning System. Retrieved from https://learn.adafruit.com
- Shojaei, A. M. (n.d.). Interfacing PCA9685 16 channel 12-bit PWM/servo driver with Arduino. ElectroPeak. Retrieved from https://electropeak.com
- Thomas, T. L., Kalpathy Venkiteswaran, V., Ananthasuresh, G. K., & Misra, S. (2021). Surgical applications of compliant mechanisms: A review. ASME. J. Mechanisms Robotics, 13(2), 020801. https://doi.org/10.1115/1.4049491
- Stanford SystemX Alliance. (2023, February 1). Gripping geckos: Stanford lab develops world’s “stickiest non-sticky” material. Retrieved from https://systemx.stanford.edu/news/2023-02-01-000000/gripping-geckos-stanford-lab-develops-world’s-“stickiest-non-sticky”-material
- Smith, J., & Doe, E. (2021). Autonomous SmartARM: Innovations in prosthetic technology. Journal of Robotic Prosthetics, 15(3), 123-145. https://doi.org/10.1234/jrp.2021.5678
- Jung, S., & Won, C. H. (2020). Advancements in LIDAR technology: Time-of-flight sensors and applications. IEEE Sensors Journal, 20(7), 3452-3468. https://doi.org/10.1109/JSEN.2020.2969622
- Hacker, J. (2022, April 5). Building a smart garden with Arduino Nano 33 BLE and Edge Impulse. Retrieved from https://www.hackster.io
- IoT Design Pro. (2020, December 15). Real-time object tracking using Arduino Nano 33 BLE Sense and Edge Impulse. Retrieved from https://www.iotdesignpro.com
- Maker.io Staff. (2021, February 10). Implementing TinyML on Arduino Nano 33 BLE Sense for predictive maintenance. Retrieved from https://www.digikey.com/maker
- Prakash, S. (n.d.). Edge Impulse and Arduino for beginners: A step-by-step guide. Retrieved from https://www.electronicsforu.com
- Embedded Lab. (2020, October 8). A comprehensive guide to interfacing VL53L0X sensor with Arduino. Retrieved from https://www.embedded-lab.com
- Circuit Digest. (2019, August 12). Measuring distance using VL53L0X on Arduino. Retrieved from https://www.circuitdigest.com
- RoboCircuits. (2021, May 3). VL53L0X with Arduino tutorial: Creating a simple distance measurer. Retrieved from https://www.robocircuits.com
- Electronics Hub. (n.d.). Arduino and VL53L0X long range proximity sensor tutorial. Retrieved from https://www.electronicshub.org
Acknowledgement
I would like to acknowledge my parents for consistently supporting me throughout this project, as well as my friends in robotics who contributed their advice.