Lower Limb Auxiliary Exoskeleton Based on Gait Dataset
Grade 10
Presentation
Problem
As the global population ages, issues about mobility and independence among the elderly have gained increasing prominence. With the elderly often facing many mobility challenges due to age-related physical limitations, there has been a growing need for innovative solutions to enhance their quality of life and maintain their independence. Among the transformative technological advancements designed to address these challenges, exoskeleton technology has emerged as a beacon of hope, offering the potential to restore mobility, improve musculoskeletal health, and provide a renewed sense of self-sufficiency for aging individuals.
Reduced mobility is a common consequence of aging, often stemming from frailty, muscle weakness, and joint issues. These limitations can significantly impact daily life, leading to decreased physical activity, potential isolation, and an increased risk of injury. Thus, the solutions that can counteract these challenges have become an urgent imperative. Traditional mobility aids, while effective to some extent, have often fallen short of offering a comprehensive solution. They can sometimes be cumbersome,
require significant upper body strength to operate and do not address the complex nuances of gait and muscle engagement essential for a natural, healthy walking pattern.
Exoskeleton technology can counter these issues by providing more structural support to the lower body and is more customizable. These wearable robotic devices, which can be programmed and tailor-made, have garnered significant attention for their ability to amplify human mobility, granting aging individuals the potential to regain stability and identify incorrect gait.
Method
This project aims to design an exoskeleton that 1) provides structural support to the lower limbs and 2) identifies the specific muscles engaged during walking—an aspect crucial for recognizing gait patterns and promoting musculoskeletal health. The second goal is significant because of the pivotal role that muscle engagement plays in fostering a balanced gait and preventing adverse outcomes such as poor posture and falling (Stotz et al., 2023). By identifying muscle contribution during walking, the exoskeleton should provide real-time feedback to users, notifying them of incorrect gait patterns and postures. The societal implications of such technology extend far beyond individual impact.
The design objectives of this walking assistance exoskeleton can be broken down into its mechanical design objectives and system control objectives.
Mechanical Design Objectives: The exoskeleton’s frame is broken down into individual metal bars that act as the limbs, with rotational components that serve as the knee and hip joints. The rotational connection parts, powered by steering motors and gears, should have a reasonable degree of mobility corresponding to the user’s movements. The torso attachment should support the spinal cord when wrapped around the user's waist.
1: Main Skeletal Framework
- Composed of individual metal bars that serve as limb segments
- Incorporates rotational components designed to imitate the movement of the human lower body
2: Four DH-03X Large Torque Alloy Servos: the joints
- High-performance motors are powered by a 12V lithium-ion battery
- Placed at the hip and knee joint locations to mimic the movements of said joints
3: 3D Printed and Laser Cut Components
- Two pairs of C-shaped, 3D-printed elements that are securely affixed to each metal bar
- Based on user’s leg measurements
- Provides a snug fit and anchors the exoskeleton in place
- Reinforced with nylon straps
- System of three laser-cut acrylic components designed to govern the movements of the calf section
- Connected a Servo positioned above the knee on the calf metal bar
4: Torso Attachment
- Encircles the user’s waist to provide support for the spinal cord
- Designed to help with the user’s posture
System Control Objectives: The steering motors, connected to an Arduino Nano Board, should move the rotational components according to the user’s range of mobility. The system uses information from a data collection process where the individual puts on a wooden exoskeleton with two potentiometers on each leg. As the user walks around with the device on, the potentiometers will send the respective degrees of the hip and knee joints’ movements to Arduino. The exoskeleton should also be connected to a Bluetooth module that allows the user to start or stop the system.
Electric Components
1: Arduino Nano Board: the central control module
- A powerful microcontroller with digital and analog pins compatible with an extensive array of sensors and other modules.
2: Bluetooth module: for easy control
- Controlled by the library Blinker.h
- Allows the user to initiate and pause the exoskeleton’s movements through the app Blinker
Code Design
1: “map ()” Function
- Converts analog-to-digital converter (ADC) values, ranging from 0 to 1023, into pulse-width modulation (PWM) values spanning from 0 to 255
- PWM values are then mapped to represent the full range of motion from 0 to 180 degrees, thereby facilitating the movement of the Servos in tandem with the user's natural movements
2: Bluetooth Module
- Uses the library“Blinker.h” and app“Blinker”
- Incorporates Boolean variable to dictate the start (false) and stop (true) of the exoskeleton’s movements
Analysis
Results
Reaching the goal of a more efficient mobility aid
- Because the exoskeleton focuses on giving the lower body external support, it does not require upper body strength
- Torso attachment provides structural support for the spinal cord and prevents hunching
- The rigid force of the Servos, when programmed to imitate a correct gait, and leg attachments helps the user to maintain the correct gait
- Simple controls with the Bluetooth “Blinker” app allow easy initiation and pause of the exoskeleton
Testing for muscle engagement
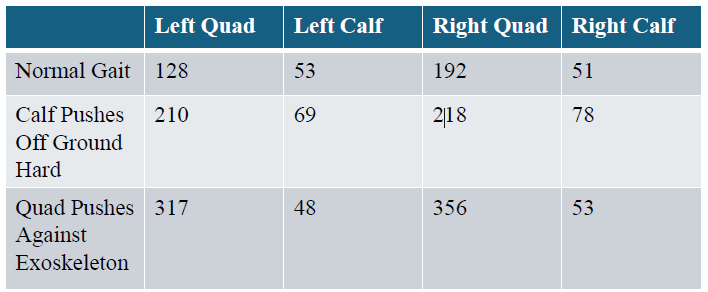
- I intentionally tensed up different muscle areas to walk in different gaits
- The approximate average ADC values recorded by the pressure sensors are shown in the chart below (I conducted three trials for each gait
Discussions
Muscle Engagement Data
- Gait when calf pushes off the ground hard: This gait is the most similar to walking patterns caused by equinus. However, equinus is primarily associated with neurological factors such as cerebral palsy, so there should still be significant differences between a true equinus gait and mine (Physiopedia).
- Gait when the thighs push against the exoskeleton hard: This gait is the most similar to the posterior lurching gait, where the hip is extended, and there is a lack of glute engagement (Ataullah et al., 2023). I felt my glutes relaxed substantially when I tensed my quads to push against the exoskeleton’s leg attachments, but this relaxation is not backed by empirical statistics at the current stage of my testing.
Areas of Challenge/Improvement
- The pressure sensors should be replaced with sensors such as muscle sensors (EMG) that are more accurate when testing for muscle engagement and activity
- More sensors can be added to other major muscle regions, such as the glutes
- The exoskeleton is relatively heavy due to the metal bars and four large Servos
- The 3D-printed leg attachments are not adjustable
- More apparent comparisons can be made by showing the correlation between the Servos' codes and the pressure data
- Future experiments should explore how adjusting various variables in the program can affect the amount of pressure the exoskeleton exerts on the user
- Graphs should be made to facilitate easy comparison
- When analyzing user gait, there should be a more concrete framework to determine what pressure data corresponds to what gait (e.g., there needs to be a difference of 50 V or more between the right and left quad for it to be classified as a specific gait). More research needs to be conducted on this.
Improvements Over Current Solutions
- Does not require upper-body strength
- Unlike traditional mobility aids, this exoskeleton provides structural support to the lower limbs through its metal bars and leg attachments
- Helps maintain gait
- While traditional mobility aids primarily focus on stabilizing the user’s weight, this exoskeleton’s torso attachment and rigid Servo rotations enforce a correct gait
Conclusion
Did my project turn out as expected?
- While this project mainly did turn out as I expected by providing good lower body support, the data on the user’s gait may be improved
- More work is being done on data collection and gait analysis
- Several challenges were met when constructing the exoskeleton (e.g., buying the correct connectors for wires and batteries), but the bulk of them surrounded the code design of data collection to program the Servos and gait analysis
Applications
- As stated previously, the target audience of mobility aids is seniors and people with incorrect gait
- Seniors
- The spinal cord and lower limbs support is incredibly concrete
- Bluetooth control makes the system easy to use
- The weight of the entire exoskeleton may be an issue for seniors with weak waists
- People with incorrect gait
- While walking with the exoskeleton on does force the user to follow a correct gait, it is unclear as to how effective or scientific this is due to a lack of experiment (progress is underway)
Citations
Works Cited
Liu, May Q., et al. “Muscle contributions to support and progression over a range of walking speeds.” Journal of Biomechanics, vol. 41, no. 15, 25 Sept. 2008, pp. 3243–3252, https://doi.org/10.1016/j.jbiomech.2008.07.031.
Physiopedia. “Classification of GAIT Patterns in Cerebral Palsy,” n.d. https://www.physio-pedia.com/Classification_of_Gait_Patterns_in_Cerebral_Palsy.
Pirker, Walter, and Regina Katzenschlager. “Gait disorders in adults and the elderly.” Wiener Klinische Wochenschrift, vol. 129, no. 3–4, 21 Oct. 2016, pp. 81–95, https://doi.org/10.1007/s00508-016-1096-4.
PracticePromotions. “Is Your Posture Causing Your Back Pain? Get Relief with Physical Therapy.” Marketplace Physical Therapy & Wellness Center, November 10, 2020. https://marketplacewellnesscenter.com/is-your-posture-causing-your-back-pain-get-relief-with-physical-therapy/.
Stotz, Andreas, et al. “Relationship between muscle strength and gait parameters in healthy older women and men.” International Journal of Environmental Research and Public Health, vol. 20, no. 7, 1 Apr. 2023, p. 5362, https://doi.org/10.3390/ijerph20075362.
Acknowledgement
Thank you to my mother for supporting my journey on this project and always being supportive when I needed to purchase materials for the project, even when I made mistakes when ordering different models. I would also like to thank Sunny, my coding teacher, for helping me whenever I had questions about my C++ code for the project.